- 教育宝
- 合肥
- 工业自动化培训
- 合肥蓝柏匠才职业培训学校
- 资讯详情






拥有一技之长,实现人生理想!
合肥蓝柏匠才老师直接接听
 微信扫码拨号
微信扫码拨号

工业机器人在什么情况下遇到奇异点
2023年04月18日 更新
 合肥蓝柏匠才职业培训学校
技术赋能企业发展
实现蓝领社会价值
合肥蓝柏匠才职业培训学校
技术赋能企业发展
实现蓝领社会价值
机器人奇异点概念:机器人自由度退化,逆运动学无解的空间位置。
工业机器人之所以会有奇异点,是因为机器人是由数学控制(公式可以达到无限大),但移动的是真实物理部件,它无法实现无限大。如果控制器命令机器人某个关节以无限大的角速度旋转180度时,机器人关节就会出现奇异点。
奇异点的类型有:腕关节奇异点,肩关节奇异点,肘关节奇异点。
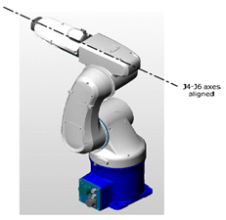
1)腕关节奇异点,当5轴为0°时,4轴和6轴在同一角度时。腕关节异点是关节机器人最 容易遇到到奇异点。
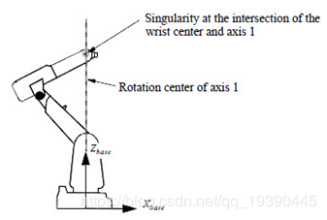
2)肩关节奇异点,5轴中心点处于通过1轴、平行2轴的平面上。肩部奇异点非常复杂,机器人逆运算时存在无数解。
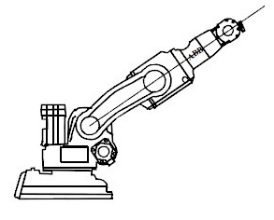
3)肘关节奇异点,在5轴中心点处于1轴、2轴组成的平面上。肘关节奇点看起来就像机器人“伸得太远”,导致肘关节被锁定在某个位置。
机器人直线行走时,经常会报错,就是因为有些点位靠近奇异点,导致机器人无法行走,由于奇异点是天生的,无法避免,因此在机器人布局时,需要格外注意取放点位和行走轨迹是否靠近机器人奇异点
奇异点的解决办法:
1.在规划路径中尽可能的避免机器人经过奇异点。
2.结合机器人运动学,优化机器人反解算法,确保在奇异点附近伪逆解的稳定性。

专业解答各类课程问题、介绍师资和学校情况
微信号:156******36
-
合肥蓝柏匠才:工业技能实战培训专家
合肥蓝柏匠才,1416平米实训场地。高级技师领衔,工信部认证工程师授课。PLC、工业机器人等课程,理论+实操。中科院博士坐镇。学技能,来这。本文主要信息和数据源自该机构在教育宝(中国知名的第三方平台)的店铺内容。
2025/8/26 15:49:18 -
合肥蓝柏匠才职业培训学校师资团队介绍 专家顾问揭秘
合肥蓝柏匠才作为安徽蓝柏教育旗下品牌,聚焦工业自动化与智能制造人才培养。其师资团队层次丰富——既有高级技师、FANUC认证工程师等实战导师,也有中科院合肥技术创新工程院博士当顾问。导师们把企业项目、赛事经验融入教学,结合特色模式,为学员提供贴近产业需求的技能培训,持续输送高素质技术人才。
2025/8/31 6:21:28 -
合肥蓝柏匠才职业培训学校两大校区地址汇总 交通指南
合肥蓝柏匠才是安徽蓝柏教育旗下专注智能制造人才培养的机构,在合肥设包河、北两大校区——包河校区挨着经开区智能制造企业堆,北校区扎进新站职教城,交通都方便。俩校区分别侧重前沿技术接触和基础技能培养,还有专业师资、定制化教学,不管是老从业者还是新手,都能找到合适的学习方式,帮你在智能制造行业成长。
2025/8/29 12:25:39 -
合肥蓝柏匠才职业培训学校报班费用参考 性价比分析
想学工业自动化、PLC编程或工业机器人操作?选培训课时*纠结“钱花得值不值”。合肥蓝柏匠才的报班费用,不是简单数字——它对应着资深行业师资、企业级实训设备、分层适配的课程,还有覆盖合肥两区的校区便利。这些价值能不能让你“技能变现”?往下看就清楚。
2025/8/28 18:02:41 -
合肥蓝柏匠才职业培训学校工业机器人培训课程如何 实训设备咋样
智能制造产业快速发展,工业机器人操作与运维人才需求激增,合肥蓝柏匠才的培训课程与实训条件受关注。该校有1416平米综合场地,课程覆盖基础到高级,配工信部、FANUC认证师资及中科院博士顾问,实训对接企业场景,两校区位置便利,适合想投身智能制造的从业者。
2025/8/27 15:38:26
相关资讯
“合肥蓝柏匠才职业培训学校”是合肥蓝柏匠才职业培训学校有限公司在教育宝平台开设的店铺,若该店铺内信息涉嫌虚假或违法,请点击这里向教育宝反馈,我们将及时进行处理。
机构评分
环境:5.0师资:5.0服务:5.0效果:5.0
相关课程
-
![]()
自动化焊接技术
请询价 -
![]()
PLC高级研修班
请询价 -
![]()
工业机器人系统运维班(YWB01)
请询价 -
![]()
电气自动化基础班
请询价 -
![]()
工业机器人系统操作班
请询价





 在线咨询
在线咨询
 申请优惠
申请优惠
 预约试听
预约试听

 返回顶部
返回顶部